
Simulation & Testing
Modern products consist of a large number of mechanical, hydraulic and electronic subsystems.
For successful market introduction, it is necessary to test the systems as a whole: both mechanical and control systems. As the degree of automatic control increases, the range of design loads expands.
Proper computational load generation (test program) is a separate task for the designers. The system and unit design team needs to be able to simulate different operating scenarios.
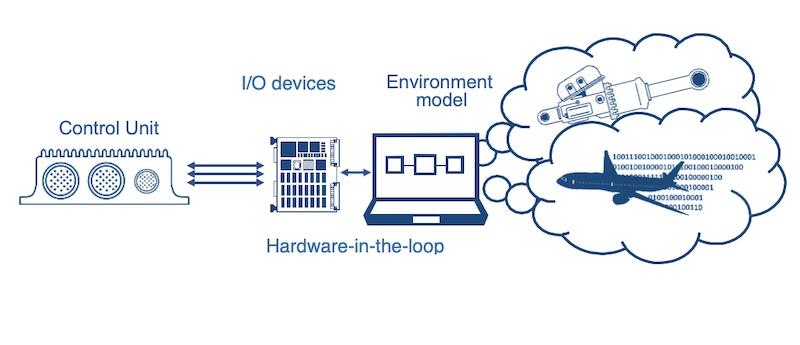
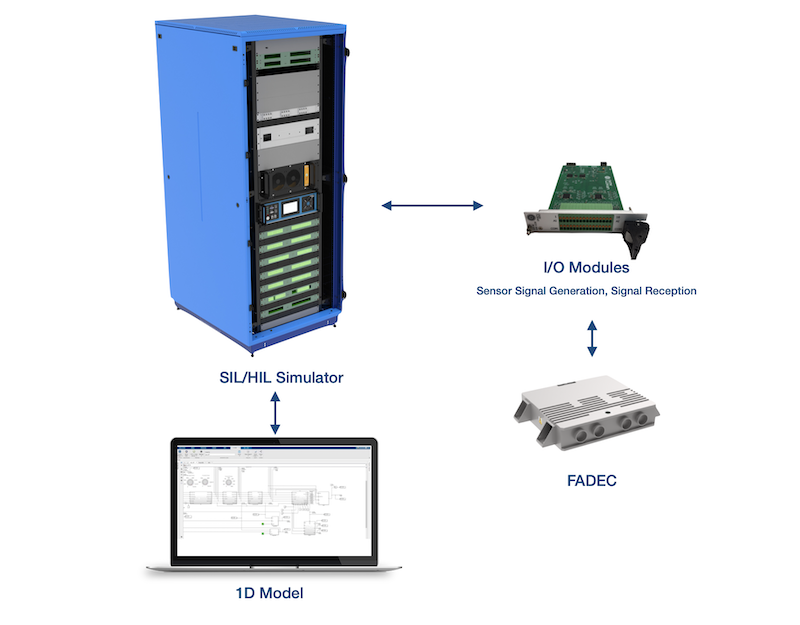
- System modelling compound is a complex solution from Urartu Systems for model-based system calculations of dynamic characteristics for components and assemblies in real-time. To increase efficiency and reduce risk, engineers can test ECUs virtually, using software models to simulate various components. All components present in the simulator can be tested both independently and in combination with each other.
The designers can load mathematical models of physical objects, parametrically adjust the model. Then the model is tested on the HIL simulator considering design loads and impacts that are close to operational ones.
Below, you can see our system modeling solutions for various industries
- design calculation,
- performance calculation,
- сalculation of characteristics of individual assemblies and units,
- simulation under various operation modes and flight conditions.
- hydraulic spring stiffness,
- clearance,
- damping for rebound and compression.
This solution makes it possible to modify car suspension performance: by controlling the hydraulic spring stiffness we can provide wide suspension travel or limit its travel.